




破局垄断危机,松诺盟勇挑大梁
发布时间:
2022-10-19
分类:
|
我国产业升级长路漫漫,可谓危机重重。从半导体芯片、材料技术、EDA 到传感器,无论是软件还是硬件,我国都面临着全方位、宽领域、多层次的严峻挑战,许多高精尖技术和装备都处于“卡脖子”状态。
事实上,我国传感器行业长期处于西方发达国家的技术和市场“双重垄断”之下。目前我国仅能生产约 7000 种传感器,仅占全球传感器种类的 1/3,极端缺乏传感器芯片制造技术的局面使得我国很多传感器长期依赖进口。特别是中高端传感器技术和国产产品的缺口很大,高端传感器芯片的进口已经超过了 90%。工业 4.0 和智能制造方兴未艾的当下,这样的情况只会愈发严重,越是进口,被“卡脖子”就越深。
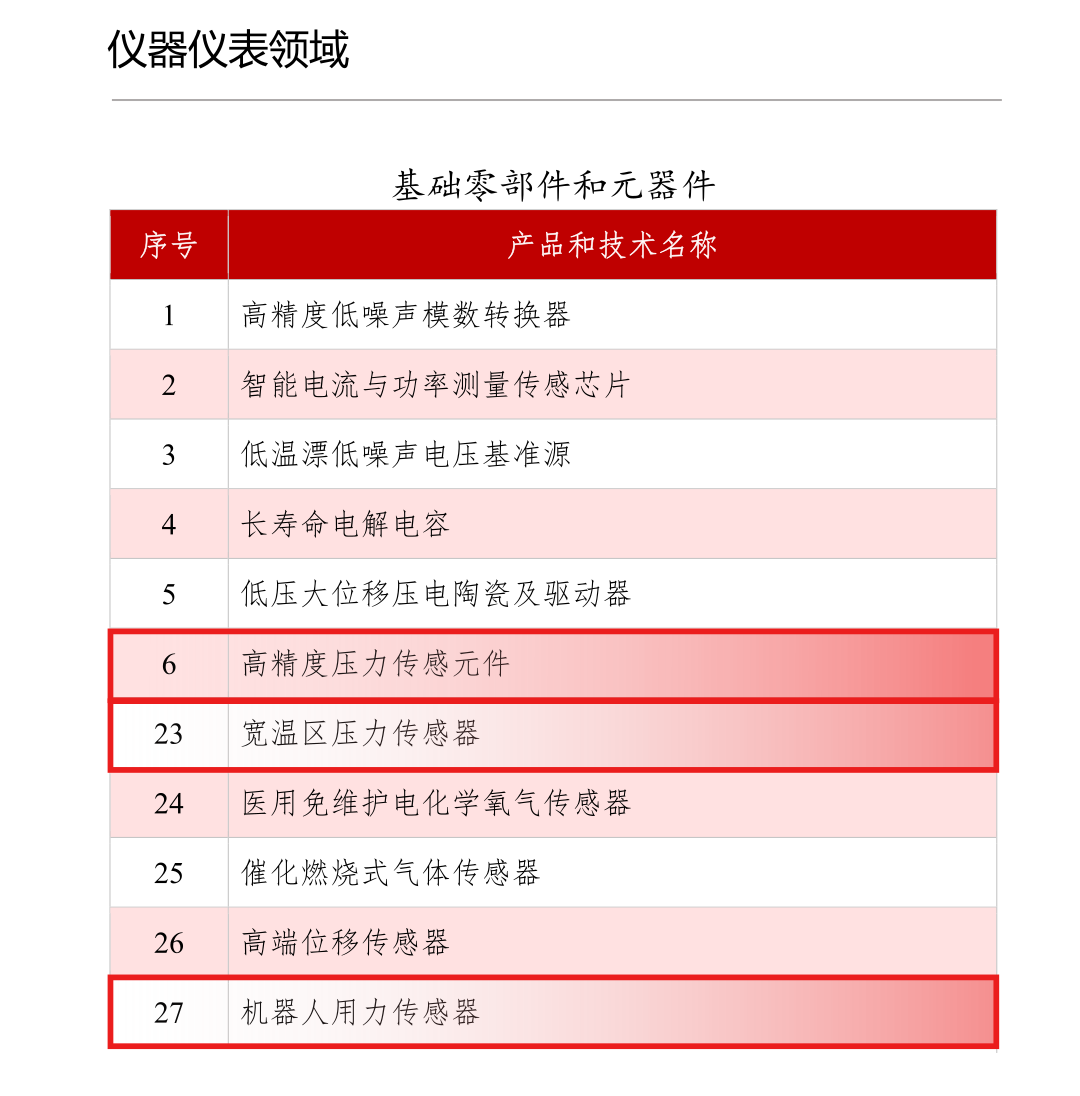
高精尖技术讨不来,也买不到。在传感器领域,我国的首要目标仍是实现核心元器件的国产化。2022 年国家产业基础专家委员会编制的《产业基础创新发展目录》(产业“五基”)就将高精度压力传感元件、宽温区压力传感器、机器人用力传感器等零部件和元器件列为我国急需突破的主要产品和技术。
▲ 产业“五基” ——仪器仪表领域的《基础零部件和元器件》共37项,其中涉及传感器23项,3项与松诺盟研发产品高度吻合
机器人蓝海下暗藏的危机
机器人柔顺控制研究是机器人领域的研究热点之一,研究成果频出,实现的方式也多种多样,有基于电流检测力的方案,也有视觉、算法的方案,但基于力矩传感器(扭矩传感器)检测外力负载的机器人柔顺控制则更为灵敏和精确,也是目前力检测系统中研究最早、使用最广、应用最成功的一种方式。
目前,力矩传感器主要集成于协作机器人的关节模组,协作机器人的出现,创造了新的工业自动化模式,而高性能力矩传感器的应用,则大大提高了协作机器人的安全性、易用性和智能化。
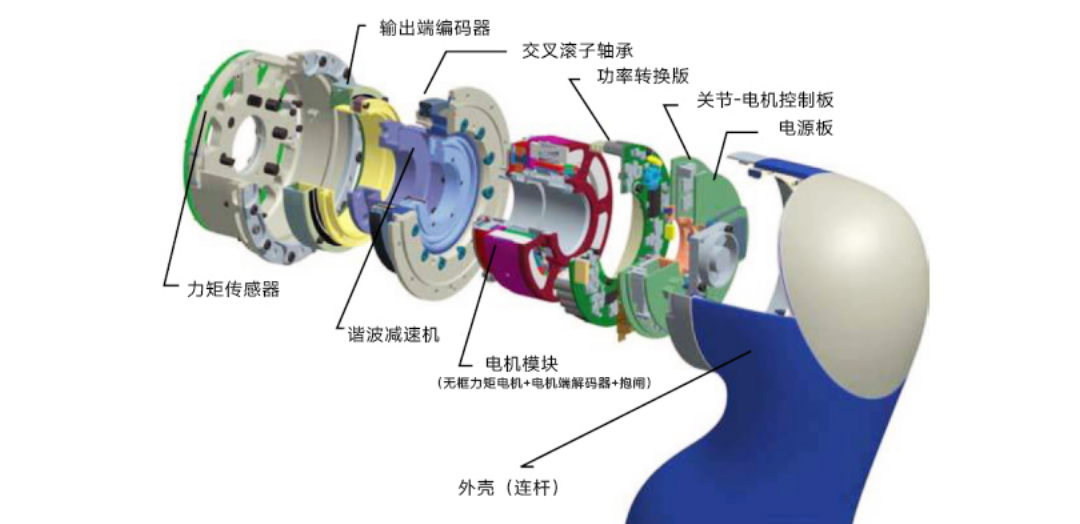
协作机器人的系统化和集成度往往很高,操作也越来越智能和轻便,可以安全、快速地与人类部署在相同的工作空间中,同时体积也越来越小。一台六轴协作机器人由六个关节模组组成,可完成空间六个自由度的运动。一个关节模组就集成了驱动器、编码器、电机、谐波减速机和力矩传感器等零部件。力矩传感器可以精准地测量关节运动过程中负载力矩的大小和方向,是机器人柔顺控制的核心零部件,通常被置于机械臂的末端和关节上。一台配置了力矩传感器的六轴协作机器人可以做到碰到人或者物体后立即停下,从而避免协作机器人对周围的事物和人造成伤害。
▲ 机器人关节模组
协作机器人是增长最快的机器人领域细分市场。根据市场分析机构 BIS Research 的报告,2020 年全球协作机器人市场价值约为 6.749 亿美元,预计到 2025 年将以 28% 的复合年增长率(CAGR)增长。到目前为止,协作机器人已被广泛应用在汽车、制造、制药和电子等行业,参与到各自动化流程之中,如机器维护、组装、精加工、检验、包装和码垛等。
然而,国内几乎没有制造商生产这样一种赋予机器人触觉的传感器。多年来,国内传感器企业多以气体、流量、温度和压力类传感器为主要业务,具备自主生产能力的更是少之又少。当前的行业状况是,几乎没有传感器制造商进行触觉传感器的研发和生产。蓬勃发展的协作机器人市场之下暗藏着巨大的危机。
从被“卡脖子”到行业“领跑者”
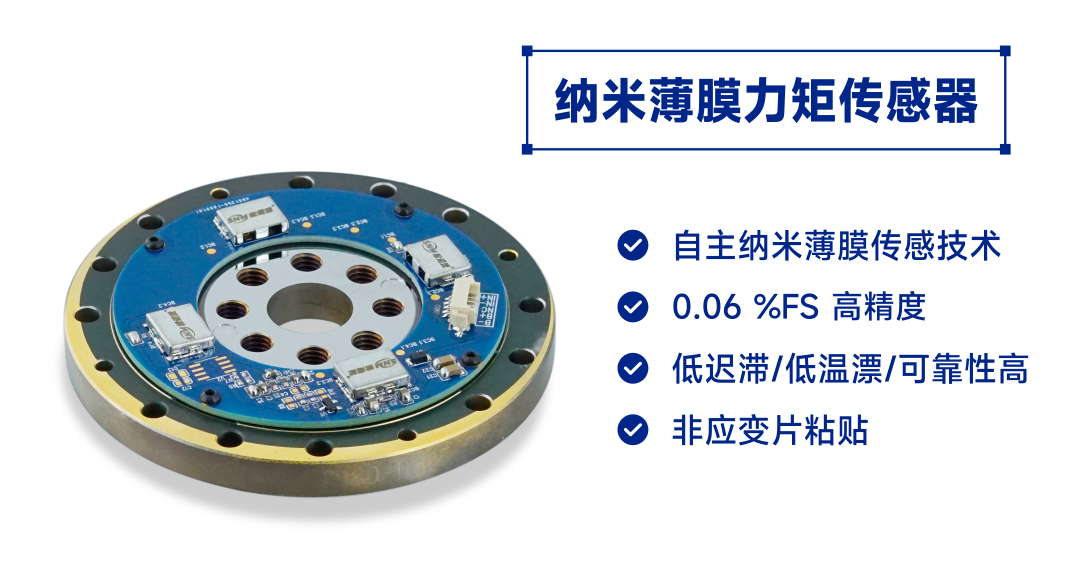
2021 年松诺盟推出国内基于纳米薄膜传感技术研发制造的力矩传感器,并在快速迭代后,将力矩传感器的精度提升至 0.06%FS,一举实现我国力矩传感器的跨越式发展。
▲ 松诺盟纳米薄膜力矩传感器
早在 2017 年,松诺盟的早期研发团队就提出将纳米薄膜传感技术应用于力矩传感器的设想并开始着手设计验证。
过去,应变类力矩传感器通常采用粘贴式工艺,把应变片粘贴至弹性体上。这类工艺具有成本低、可快速批量生产的优点,但也存在天然的缺陷。当协作机器人关节的力矩作用于力矩传感器的弹性体上时,弹性体随之产生形变,但粘胶层的存在会使应力产生衰减;且在长时间工作后,粘胶会产生老化问题。因而,粘贴式应变传感器通常具有显著的迟滞、蠕变和老化缺陷,同时,关节力矩传感器单一轴向快速正负变换的工作方式则放大了这一缺陷。
但同样基于应变原理的纳米薄膜力矩传感器从根本上解决了传统粘贴式力矩传感器的缺陷。
纳米薄膜力矩传感器是在高洁净真空环境下,采用离子束溅射工艺轰击靶材和金属弹性体,随后缓慢沉积“长成”应变电阻层,使应变电阻、金属弹性体和保护薄膜三者达到原子级融合的生产工艺。这是纳米薄膜力矩传感器区别于传统力矩传感器的显著特征。这一技术从源头上消除了粘胶层,避免了此类工艺带来的蠕变、迟滞和老化的缺陷,从而使力矩传感器在频繁的关节旋转中可以长期稳定工作,精度更是达到 0.06%FS。
纳米薄膜传感技术的应用大幅提升了协作机器人关节力矩传感器的精度和稳定性,推动了我国力矩传感器技术的革新,成功将我国带入世界先进力矩传感器赛道,解决了我国又一项“卡脖子”技术难题。
集成高精度力矩传感器赋予了协作机器人精确感知外部力矩负载的能力,为协作机器人后续开发更出色的交互能力奠定了良好基础。长期高度依赖进口力矩传感器的状况正在改变,国产高性能力矩传感器技术的突破将有力保障我国产业升级的安全和推动我国传感器行业的发展。未来,随着越来越多高性能传感器实现国产化替代,我们与机器人畅快、安全、自然、平顺地交互将成为常态。 |

相关新闻







Copyright © 2025 松诺盟科技有限公司 所有